ACOT® 穩定度測試
摘要
ACOT (Advanced Constant ON-Time) 降壓型之直流轉換器為非線性遲滯控制架構。因此,若使用量測迴路增益
(loop gain) 的方式來獲致系統之增益邊限 (G.M.) 與相位邊限 (P.M.) 以判斷系統穩定度之特性,將會導致不正確的結果與錯誤的結論。Richtek
建議在判斷ACOT 直流轉換器之系統穩定度時,使用動態負載測試而不是用開迴路增益/相位量測。本應用須知 (Application Note) 內容包括了,ACOT直流轉換器正確的穩定度測試之理論基礎、量測方法和設計準則。此外,還有針對設計和量測工具的說明、波形的分析和注意事項。
1. 前言
ACOT降壓型之直流轉換器為非線性遲滯控制系統,其動作原理為在輸出電壓 (V-out) 漣波上加入一VIC (Virtual
Inductor Current) 漣波與參考電壓做比較來產生一調變訊號 (PWM),如圖一所示。內部會由SW訊號來產生VIC訊號 (交流),並且藉由內部所產生的VIC訊號來增加系統之穩定度。
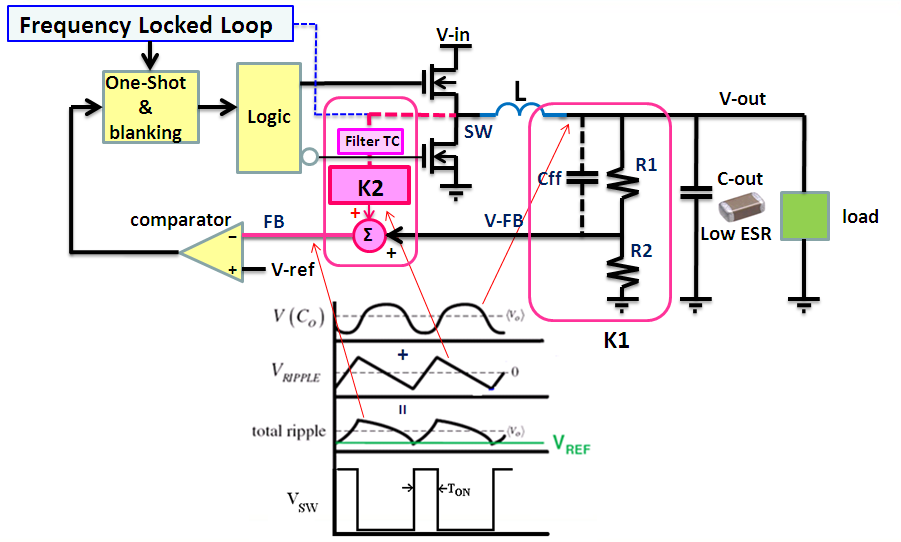
圖一:ACOT 降壓型轉換器控制機制
在傳統的電壓控制模式與電流控制模式量測迴路增益 (loop gain) 時,會將擾動信號注入在輸出電壓回授路徑上。然而在ACOT直流轉換器中,輸出電壓的訊號不僅用於調變PWM,也有回授控制之用途。若將擾動訊號注入在輸出電壓回授路徑上,將會改變原先PWM調變的行為而導致所量測出來的波德圖會變得無法被預測或解釋。圖二為電流模式控制系統開迴路增益/相位
(左圖) vs. ACOT系統 (右圖)。
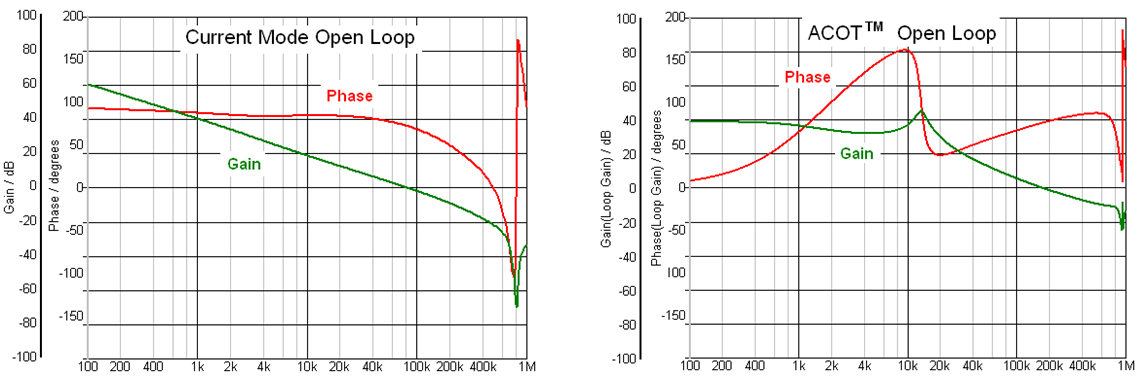
圖二:電流模式開迴路增益/相位模擬和ACOT直流轉換器顯示出非常不同的結果
ACOT直流轉換器可以藉由計算閉迴路響應來做頻域分析:在輸入控制訊號 (Vref) 加一個正弦波的擾動訊號以繪製輸出電壓對輸入控制訊號的波德圖,如圖三所示。
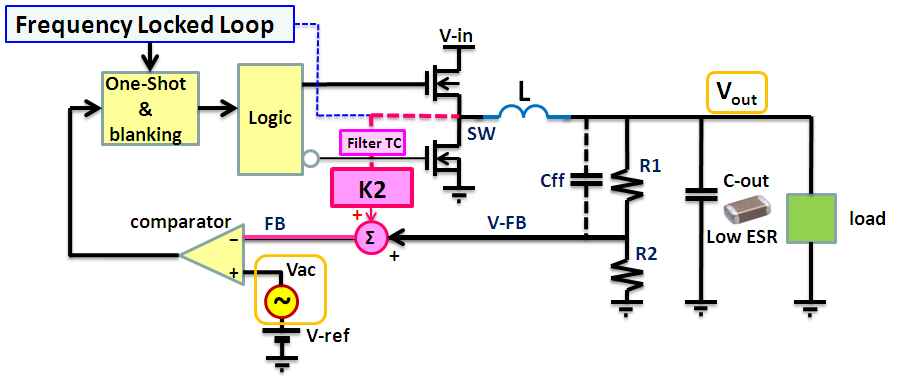
圖三:ACOT降壓型直流轉換器閉迴路量測
量測ACOT閉迴路響應的方法提供了很準確的結果,因為於穩定的直流控制訊號中加入了擾動訊號,使得動態調變訊號不會被干擾。因此所量測出來的波德圖可以被預測。圖四為電流模式閉迴路增益/相位(左圖)
vs. ACOT(右圖)。
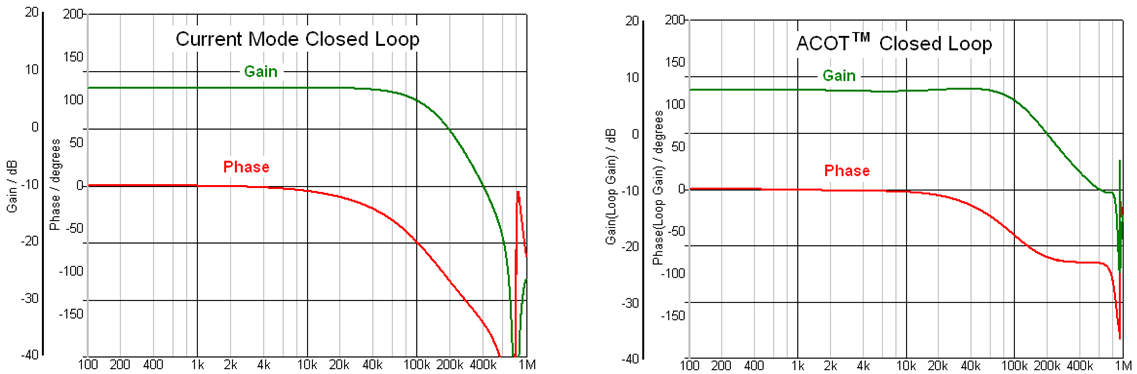
圖四:電流模式閉迴路增益/相位模擬和ACOT直流轉換器顯示出相似的增益和相位圖
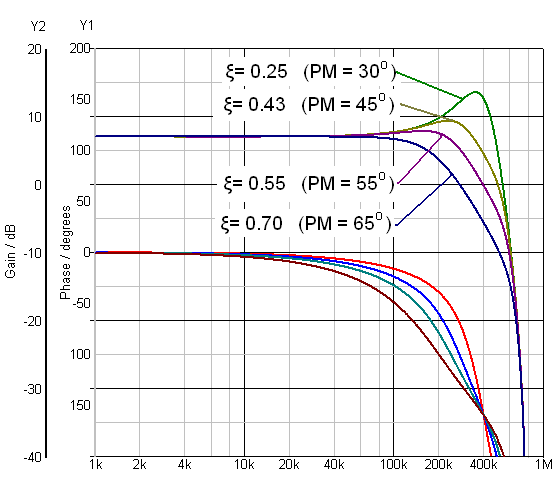
圖五:不同阻尼係數下,電流控制模式閉迴路增益-相位 (切換頻率800 kHZ)。
在閉迴路分析中,可藉由閉迴路響應來觀察系統的穩定度。較平緩的增益響應代表系統較穩定(臨界阻尼或過阻尼響應)。如果有嚴重的峰值會造成相位在諧振頻率點被嚴重衰減,也就意味著對應到系統開迴路增益的相位邊限比較小。圖五為閉迴路增益/相位搭配不同阻尼值的範例。
較低的阻尼係數 ξ會對應到較低的相位邊限。為了確保開迴路相位邊限高於 45。,閉迴路阻尼係數ξ必須大於0.43。
2. ACOT 降壓型轉換器穩定度之邊界條件
傳統的Constant On-Time (COT) 降壓型之直流轉換器應用上,有兩種方法可以改善較大的輸出電容漣波延遲所造成的次諧波震盪
(sub-harmonic) 或系統不穩 (modulation unstable)。第一種方法是增加與電感電流同相位的訊號;第二種方法是增加外部的斜坡訊號
(external ramp)。在實際的應用上,第一種方法較普遍被使用,藉由增加輸出電容ESR上的漣波來增強系統之穩定度,但是這樣的方式為了確保系統之穩定度
就必須限制輸出電容ESR的最小值。由於現今產品的趨勢走向輕薄短小化,因此MLCC被廣泛的使用,但是MLCC的ESR非常小且電容漣波比較大,所以容易造成系統發生不穩。
Richtek所提出的ACOT直流轉換器可以克服上述的問題,藉由內部所產生的VIC的漣波訊號來增強系統之穩定度。如此一來,ACOT直流轉換器可以使用ESR較小的輸出電容,並且在廣泛的應用和操作條件下,皆能有很好的穩定度表現。
不過在某情況下系統仍然有機會發生不穩定:
a. 當使用非常小 (< 5μF) 的輸出電容時,其輸出電容的漣波振幅比內部所產生的VIC漣波大很多。因此,較大的輸出電容漣波會造成較大的相位延遲,進而導致次諧波震盪或系統不穩定。在一般的應用下,建議使用的輸出電容值範圍為22μF
~ 66μF。
b. 高責任週期 (duty cycle) 的應用下(較高的輸出電壓或較低的輸入電壓),內部所產生的VIC漣波訊號的振幅大小會增加。然而,較大的VIC漣波會使得迴路響應變慢,輕則可能會導致系統發生欠阻尼響應;重則會導致系統發生不穩定。這些現象特別容易在較高的輸出電壓應用下被發現,如12V轉5V。
容易造成此現象的外部元件有:
- 較高的回授網路衰減 (較高的輸出電壓應用)
- 較大的輸出電容值
- 較大的電感值
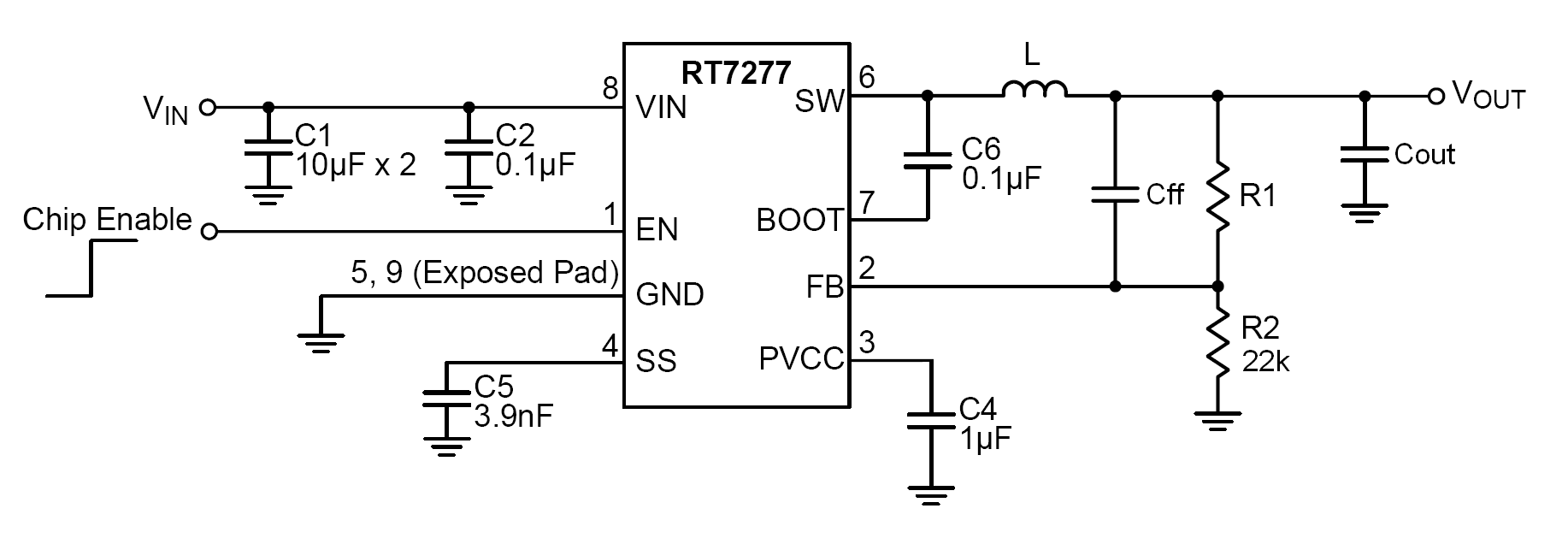
對於以上這些應用,建議在回授電阻R1上並接一個前饋電容 (Cff),來增加控制系統的阻尼,如圖六所示。
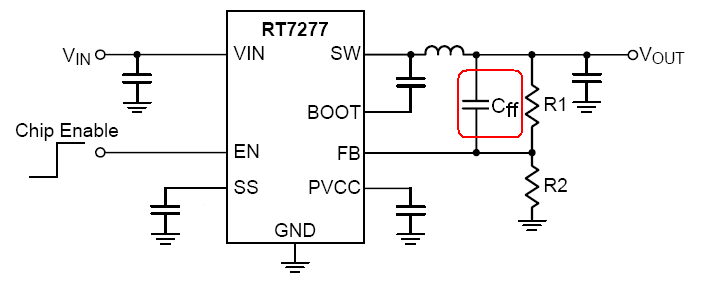
圖六:ACOTTM 直流轉換器線路圖, 前饋電容 ( Cff )
能被用來增加系統的阻尼。
ACOT 直流轉換器產品規格書中的建議應用元件表格,皆有列出可使系統穩定的前饋電容(Cff)
建議值。為了達到最佳化的穩定度設計與系統應用驗證,Richtek提供了一套設計工具來最佳化設計前饋電容(Cff)的容值以及驗證系統之穩定度。
3. ACOT 穩定度設計工具
ACOT 直流轉換器的穩定度設計工具可以用來計算最佳化前饋電容 (Cff) 的容值。
在輸入所有應用參數 (ACOT產品名稱、輸入和輸出電壓、輸出電容的容值與ESR和電感器的感值) 之後,設計工具會根據以上參數,先計算出回授分壓網路之電阻值
(R1與R2)。接著,計算出系統的阻尼與繪製閉迴路系統之波德圖。為了確保系統能夠穩定且有較佳的動態響應,其系統的阻尼必須大於0.5。若系統的阻尼小於0.5,則建議使用前饋電容來增加系統的阻尼,以確保系統之穩定度與較佳的動態響應。
使用者可以由ACOT穩定度設計工具計算出建議的前饋電容值來選擇適當的前饋電容值,再藉由設計工具來計算阻尼係數ξ,以判斷系統的穩定度。
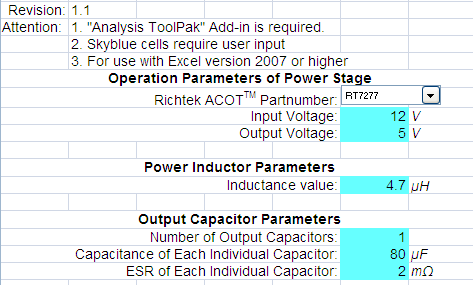
圖七為應用參數輸入欄位。以輸出電壓5V及MLCC 80μF 的應用為例。
圖八
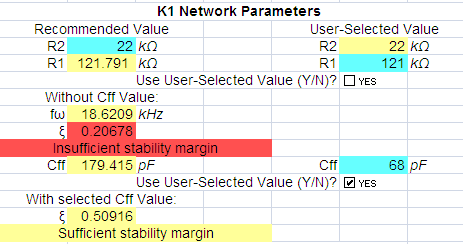
ACOT穩定度設計工具會根據所輸入的應用參數來計算出系統的阻尼,如圖八所示,若系統的阻尼小於0.5,則需使用前饋電容來增加系統的阻尼。設計工具會建議一前饋電容值為180pF,其能確保其系統的阻尼係數ξ
大於 0.707;當所使用的前饋電容值 為 68pF時,其系統的阻尼係數 ξ為 0.509。此時雖然系統會有些微的欠阻尼情況,但系統仍然會穩定且有足夠的穩定度邊限。
此工具會繪製有無使用前饋電容兩種情況的閉迴路增益波德圖(增益和相位曲線)。

圖九:閉迴路增益沒有加 Cff (左圖) 和加入Cff = 68pf
(右圖)
4. ACOT降壓型轉換器之穩定度測試
雖然ACOT轉換器能以閉迴路來做分析,但由於ACOT直流轉換器的產品並沒有控制訊號腳位 (Vref),所以無法量測實際上的閉迴路增益。儘管如此,因為系統的阻尼係數與動態響應之間有關聯性,因此可以藉由負載步階響應來評估ACOT直流轉換器的穩定度。
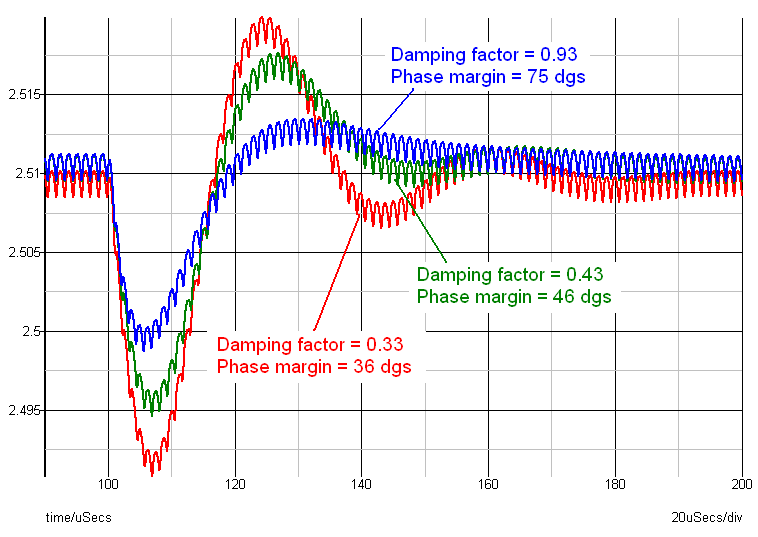
圖十:ACOT 降壓型之直流轉換器 output voltage during load step
圖十為ACOT直流轉換器在不同的阻尼係數ξ下 ,快速的負載步階暫態響應對輸出電壓的影響。
明顯地系統於不同的阻尼係數ξ下,當負載變動時,輸出電壓的暫態響應會有所不同:
當系統有足夠的阻尼係數時,如藍色波形所示,其輸出電壓的暫態反應不會發生震盪。當系統的阻尼係數下降時,如綠色波形所示,其輸出電壓的暫態反應會發生震盪。隨著系統的阻尼係數更進一步的減少時,如紅色波形所示,其輸出電壓的暫態反應會發生震盪且震盪頻率變快,意味著震盪的週期次數變多。
對於ACOT 直流轉換器而言,系統的阻尼係數大於0.43是可以被接受。然而若考慮實際元件的誤差,其系統的阻尼係數必須大於0.50,才能確保輸出電壓在暫態響應時的震盪次數小於1.5個週期。
5. 量測設置設定說明
藉由快速的負載變化來確認穩定度,其負載步階必須要非常快且要超過轉換器的頻寬。以ACOT直流為例,系統迴路頻寬可以在100k~200kHz之間,所以負載步階變化最大的上升時間必須為500nsec
(dI/dt ≈ 2A/μsec),以確保激勵源的頻率是足夠的 (>300kHz)。實際上負載步階變化的振幅是沒有一定的準則,一般來說,建議的電流步階是最大負載的20~30%。因此,對於3A的直流轉換器來說,1A的峰對峰的電流步階是比較合適的。
對於具有增強輕載效率模式的直流轉換器而言,步階負載的變化範圍必須處在直流轉換器的PWM操作區間內,避免跨越到輕載效率範圍,且不能超過電流限制的門檻。綜合以上的原因,合理的負載變化範圍為最大負載的1/3到2/3。
大部分的電子負載不能產生很快的步階負載變化,所以我們可以用一個簡單的工具來產生快速的步階負載變化。圖十一為一可產生快速步階負載變化的工具之範例:為一由脈衝訊號驅動的MOSFET開關所構成。其中R3連接於輸出端來設定靜止負載的初始條件,MOSFET開關則會切換直流轉換器輸出端的電阻
(R1和R2),以實現步階的負載變化。
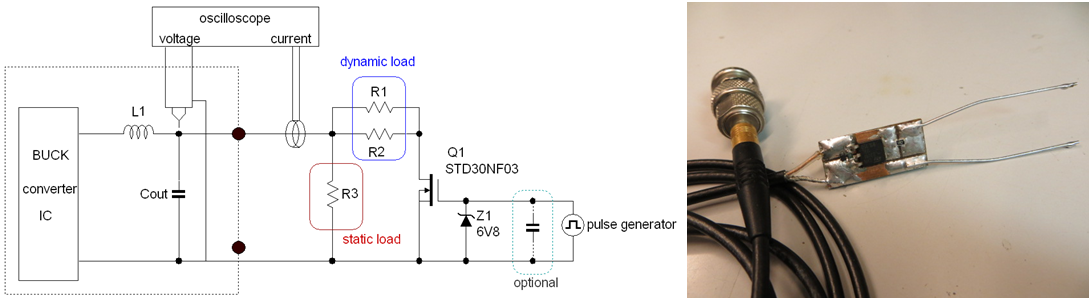
圖十一
這套工具可以產生非常快速的負載電流變化斜率dI/dt (其上升時間大約50nsec),但是這麼快速的負載電流變化斜率可能會產生震盪,而這震盪不是因為直流電源轉換器穩定度所引起,而是降壓型直流轉換器輸入端的震盪所引起的
(電源供應器的線、輸入端的陶瓷電容和PCB的走線等)。藉由增加步階負載的上升時間 (大約500nsec) 或降低負載電流變化斜率,皆可善此現象。負載變化斜率與脈衝產生器的驅動訊號速度有關,為了降低電流負載變化斜率,可在MOSFET的閘極端並接一電容來降低驅動的速度。除此之外,於輸入端電容並接一個
220μF的電解電容亦可抑制輸入端的震盪。為了防止動態負載電阻上的功率消耗太大,可將脈波負載操作於較低的責任週期 (大約20% 或更低)。
圖十二為典型的量測設置
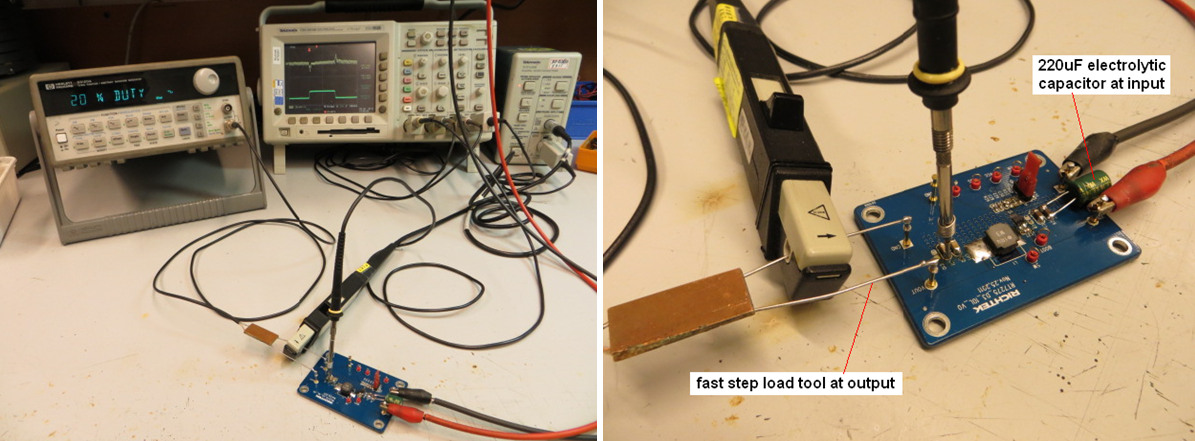
圖十二
以下為幾個快速步階響應量測 的範例:
(基於RT7277GSP於5V與1.8V的應用)
|
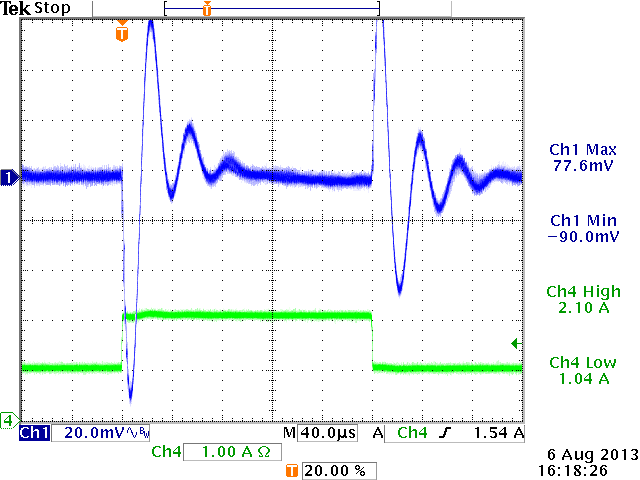
5V 之應用:
|
|
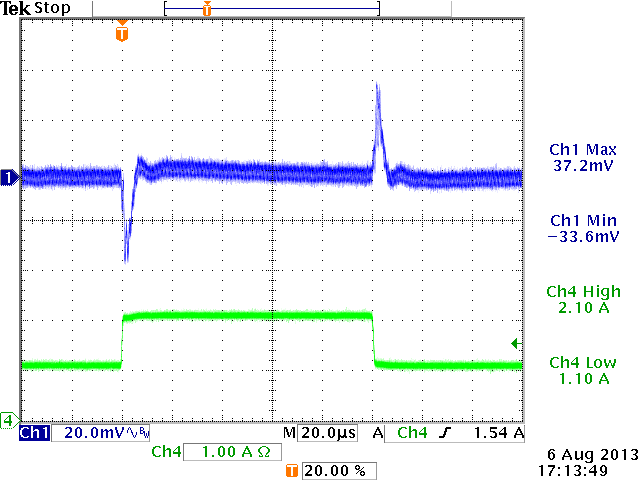
12V→5V,
Cout=60μF, L=4.7uH, Cff = 0pF
|
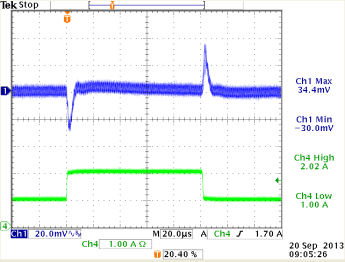
12V→5V,
Cout=60μF, L=4.7uH, Cff = 39pF
|
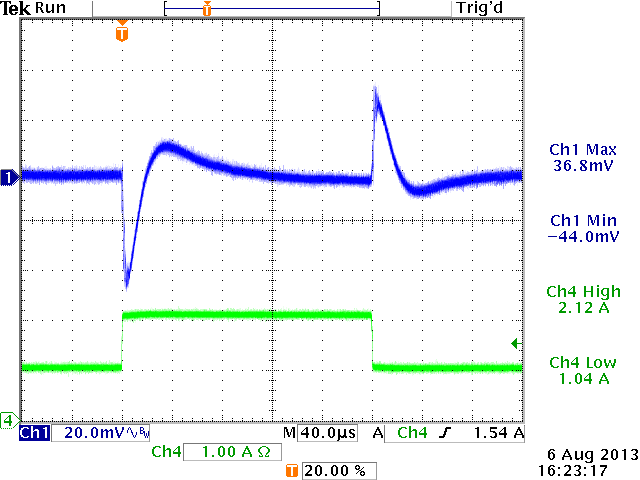
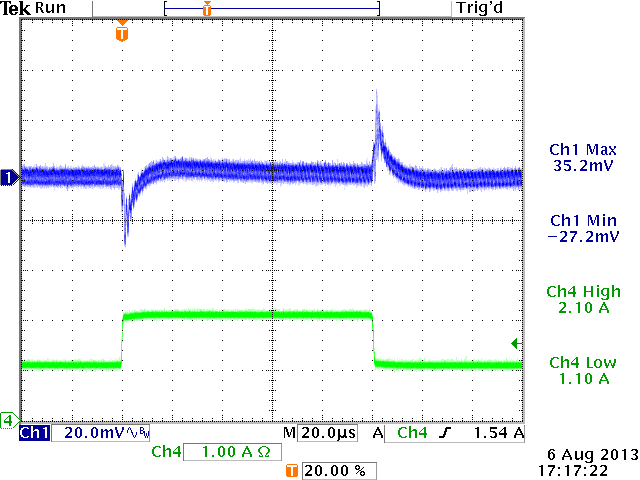
12V→5V,
Cout=60μF, L=4.7uH, Cff = 82pF
|
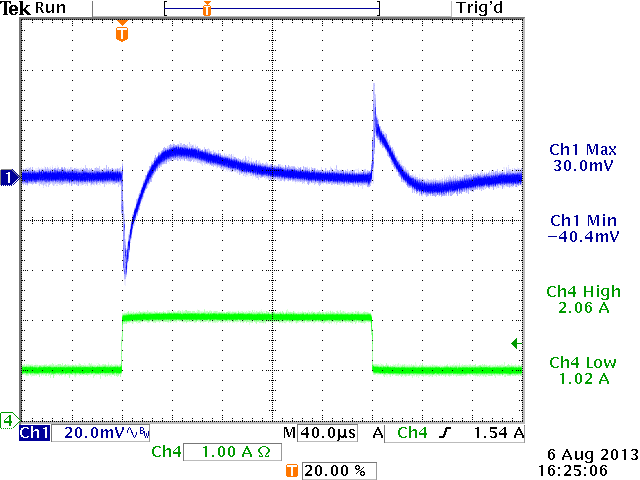
12V→5V,
Cout=60μF, L=4.7uH, Cff = 150pF
|
|
|
|
|
|
|
ξ = 0.24 (from design tool)
嚴重的欠阻尼
|
ξ = 0.44 (from design tool)
欠阻尼但是可接受
|
ξ = 0.65 (from design tool)
足夠的阻尼
|
ξ > 0.707 (from design tool)
(actual ξ value ~ 1.1)
過阻尼 : 最佳的穩定度
|
|
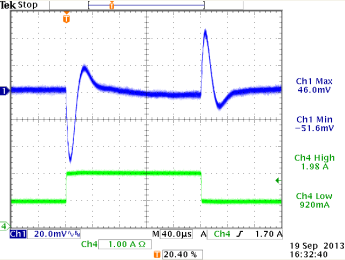
1.8V之應用:
|
|
12V→1.8V,
Cout=44μF, L=2.2uH, Cff = 0pF
|
12V→1.8V,
Cout=44μF, L=2.2uH, Cff = 15pF
|
12V→1.8V,
Cout=44μF, L=2.2uH, Cff = 100pF
|
12V→1.8V,
Cout=4.7μF, L=2.2uH, Cff = 0pF
|
|
|
|
|
|
|
ξ = 0.35 (from design tool)
欠阻尼
|
ξ = 0.43 (from design tool)
欠阻尼但是可接受
|
ξ = 0.64 (from design tool)
足夠的阻尼
|
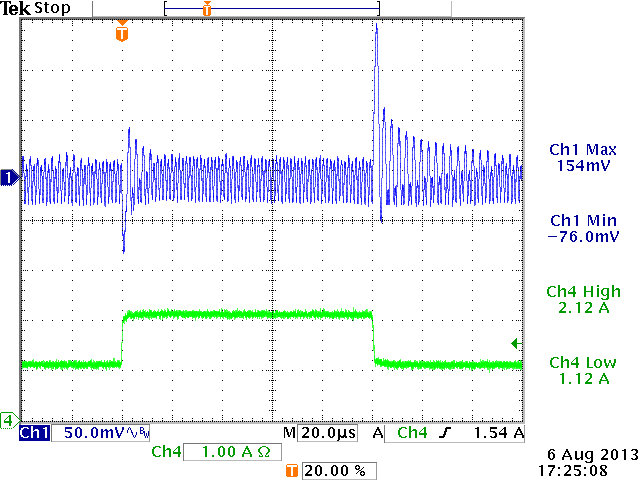
ξ = 0.11 (from design tool)
輸出電容值太小引起次諧波震盪所以 需增加電容值
|
6. 量測注意事項
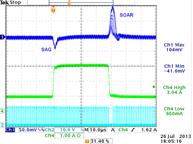
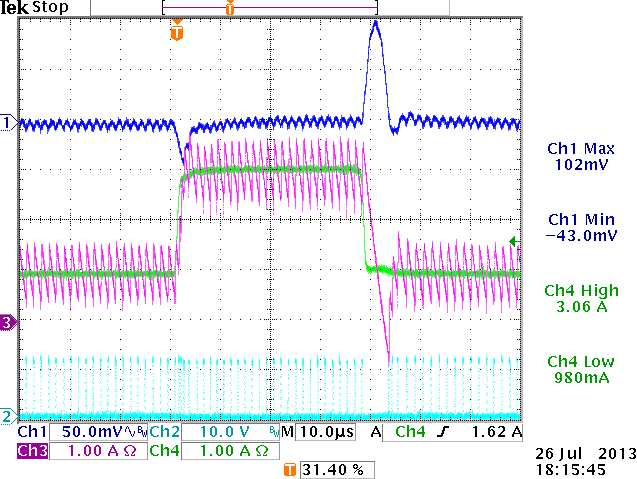
在步階負載變化上升的期間,其輸出電壓將會有欠壓效應 (sag effect),此欠壓 (undershoot)
主要是由直流電源轉換器的反應速度與最大責任週期來決定。
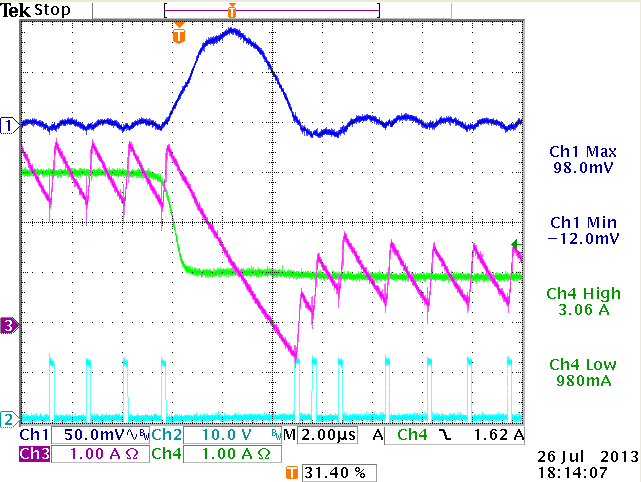
在步階負載變化下降的期間,其輸出電壓將會有過壓效應 (soar effect),此過壓 (overshoot)
主要是因為電感電流下降速度不夠快以及電容的容值不夠所造成。
在這過壓效應期間沒有PWM訊號,因此過壓主要是由負載變化的振幅、電感的感值與輸出電容容值來決定。特別在低輸出電壓的應用上,因為Vo/L比較小的關係,所以電感電流變化斜率也會比較慢,過壓效應會特別明顯。上述之欠壓與過壓現象並不代表系統不穩定。
|
1.2V application with large
fast step:
Blue = Vout,
Green = load current
Cyan = SW signal
|
1.2V application large fast step
Purple = Inductor current,
Green = load current
Cyan = SW signal
|
Zoom in to soar effect:
The inductor current drops slower than load
current, thereby charging the output capacitor
|
|
|
|
|
|
V-out shows overshoot at step-load falling edge
(the overshoot can vary, depending whether it happens during Ton or
Toff)
|
Capture of max soar with inductor current added.
|
Soar on output happens due to slow discharge
of inductor current. Soar is not related to stability.
|
7. 總結
Richtek所提出的ACOT直流轉換器可以克服輸出電容漣波延遲所造成的次諧波震盪或系統不穩的問題,藉由內部所產生的VIC的漣波訊號來增強系統之穩定度。如此一來,ACOT直流轉換器可以使用ESR較小的輸出電容,並且在廣泛的應用和操作條件下,皆能有很好的穩定度表現。在某些應用中
(特別是在較高的輸出電壓應用),ACOT直流轉換器可能會出現欠阻尼響應,藉由加入一個前饋電容來提高系統阻尼,可以達到較好的阻尼響應。
ACOT降壓型之直流轉換器為非線性遲滯控制架構。因此,不建議用傳統的增益迴路量測方式來分析 ACOT 降壓型之直流轉換器的穩定度。Richtek提供一套可以計算出閉迴路系統的阻尼係數的設計工具,藉以判斷系統的穩定度。除此之外,設計工具也會幫助使用者計算出應用所需的前饋電容值,藉以提高系統穩定度。
在實際的量測中,由於系統的阻尼係數與動態響應之間有關聯性,因此可以藉由負載步階響應來評估ACOT直流轉換器的穩定度。當系統有足夠的阻尼係數時,其輸出電壓的暫態反應不會發生震盪。在快速的負載變化期間,有較佳的阻尼係數之系統,其輸出電壓的暫態反應會有較小的震盪。